










2026年4月23日,在“2026空天地一体化智能巡检大会暨第11届全国无人机电力应用技术高峰论坛”上,“金巡奖”第8届全国电力巡检技术创新应用评选结果公布。
国网湖州供电公司公司凭借其“基于具身智能技术的特高压带电作业通用检修机器人的研究与应用”案例,获得“电力机器人创新应用案例奖”。

创新点
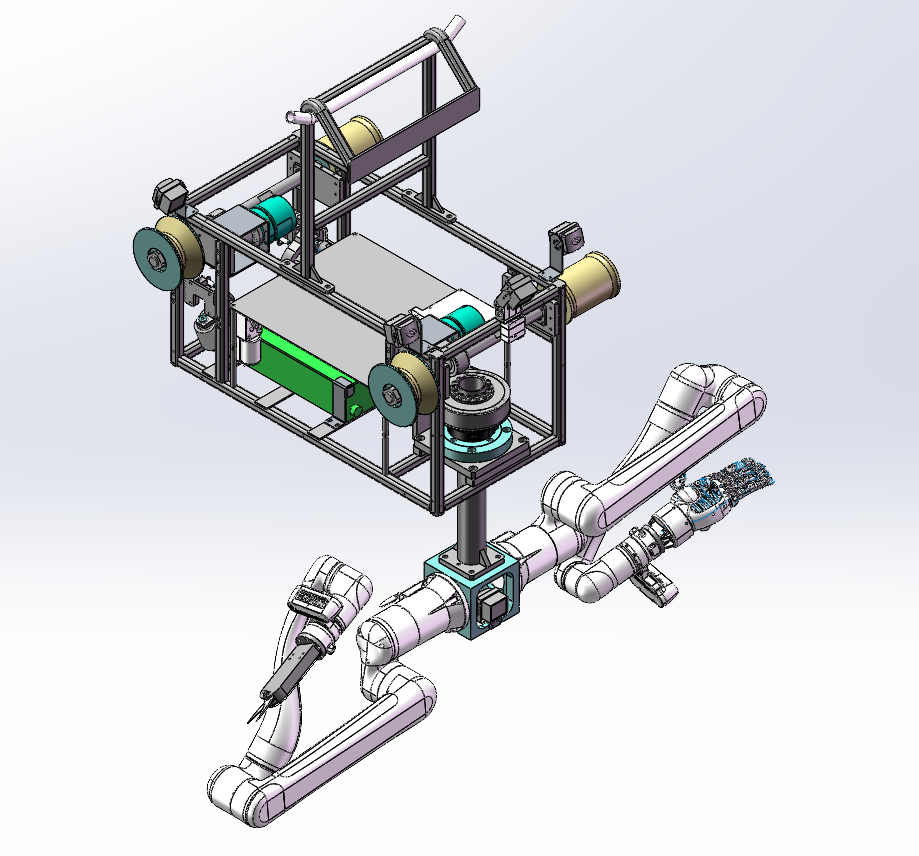
1.首创“主-辅”双仿人臂协作架构,突破高空精细作业能力瓶颈
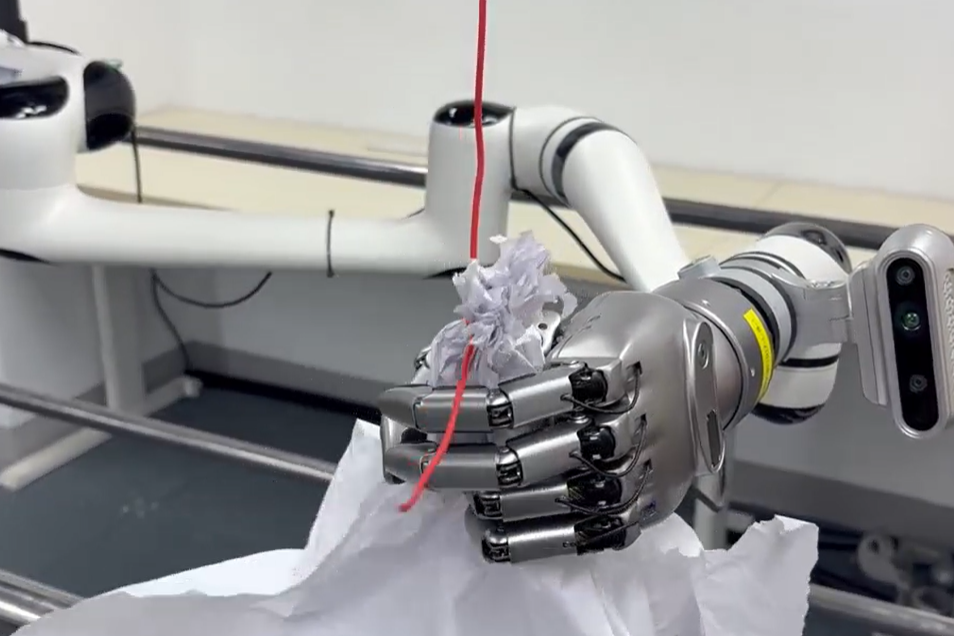
传统单臂机器人在面对缠绕类异物、金具紧固等复杂任务时,缺乏辅助支撑,难以完成需要“一持一操”的精细操作。本项目提出主辅双臂协同作业模式,模拟人类双手配合的自然操作范式,一臂稳定夹持,另一臂执行剪切、拧紧等动作。单臂自重不足7.5公斤、负载超5公斤,兼顾轻量化与高性能,配合模块化快换末端执行器,一机覆盖异物清除、金具检修、应急修补等多类型任务。
2.首创具身智能导线力觉感知技术,解决远程作业“有眼无手感”难题
远程操控机器人最大的挑战在于操作员无法感知末端接触力,容易对线路设备造成刚性冲击损伤。本项目构建六维力传感与力反馈闭环系统,将末端接触力实时映射至操作手柄,使操作员在300米外也能获得真实力觉感知,实现螺栓拧紧、开口销插拔等接触式作业的柔顺精准控制。
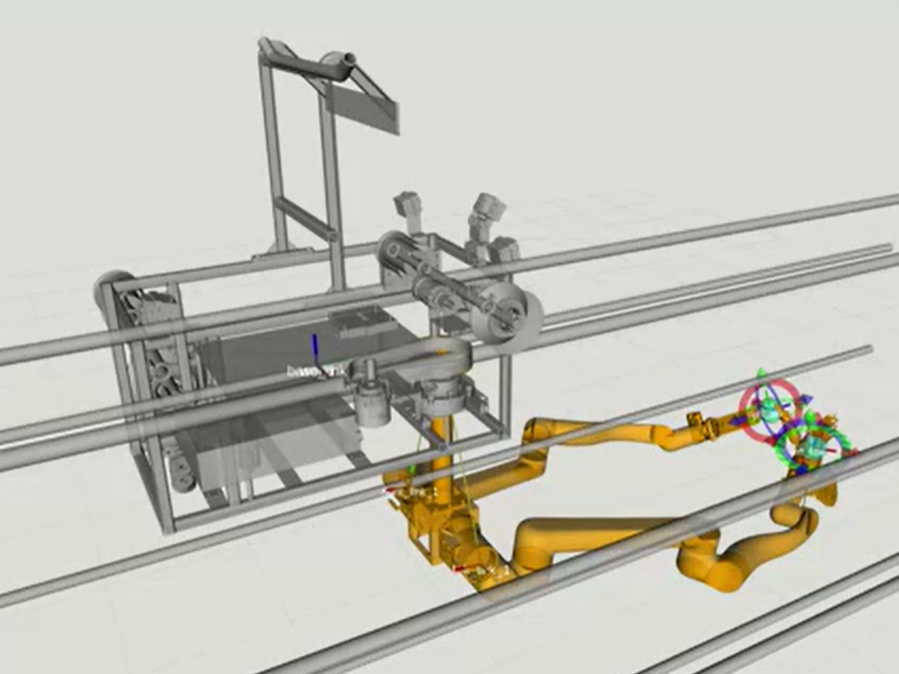

3.首创多分裂导线数字孪生遥操作地面站,破解强电磁环境下超视距操控难题
特高压环境电磁干扰强烈,传统无线通信易中断,操作员远距离作业时缺乏空间感知。本项目搭建数字孪生地面站,将真实场景、虚拟镜像与控制设备三维映射,提供沉浸式操作界面;通信采用5G与LoRa双链路冗余加光纤骨干网架构,端到端延时低于10毫秒,确保控制指令与视频信号在复杂电磁环境下稳定传输。


4.首创特高压线路检修通用化平台设计,打通从单一场景到多领域推广路径
区别于传统专机专用的开发思路,本项目以标准化控制框架为底座,支持任务级快速配置与多末端工具适配,首次在真实特高压带电环境中完成导线异物清除实战,效率较人工提升超5倍。该平台架构具备向桥梁巡检、风电运维、核电检修等高空高危场景复用推广的能力,实现“一次研发、多场景落地”。
应用成效
1.社会经济效益
相较传统人工登塔带电作业方式,机器人系统显著降低了高空作业安全风险和人工成本。传统清障作业需5-6名作业人员配合,单次作业耗时约3-4小时;采用具身智能双臂检修机器人远程操控方式,仅需2-3名操作人员,单次作业时间缩短至1小时以内,效率提升超3倍。减少了线路停电时长和交通封道等间接成本,单次作业综合成本降低约60%。

2.提升作业效率与质量
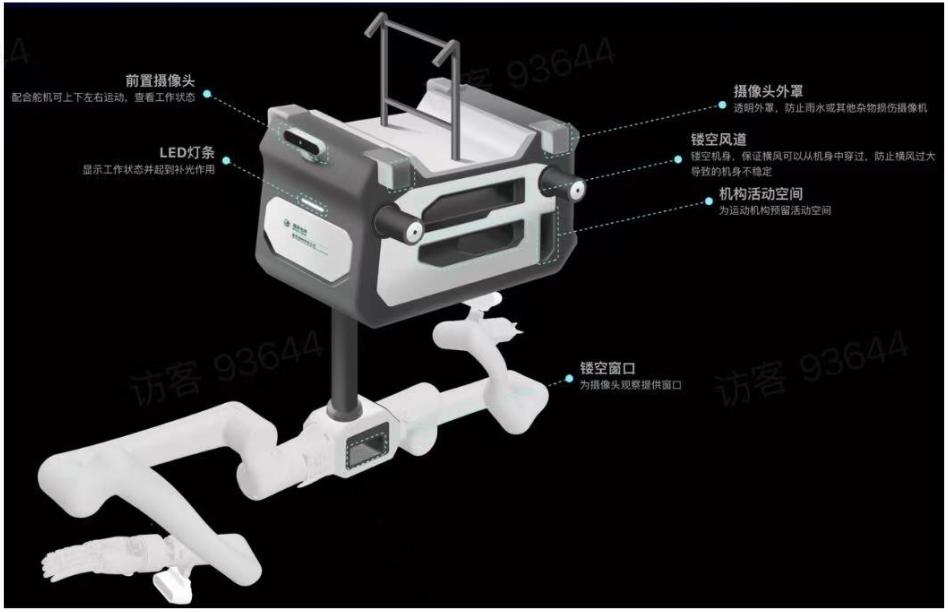
机器人搭载多模态感知系统,可精准识别缠绕在多分裂导线上的细小易飘物,配合模块化末端执行器实现快速清除,避免了人工作业中因高空风力、视野受限等因素导致的操作失误。无视山区、交叉跨越等复杂地段,可利用协同技术进行远程操作。
3.保障作业安全
操作人员在300米安全距离外通过地面站远程操控,全程无需人员接触高压线路,彻底消除了高空坠落和电击风险。系统配备5G与LoRa双链路冗余通信及数字孪生实时监测,端到端延时低于10毫秒,操作员可实时感知作业环境并规避危险,确保作业过程安全可控。
4.服务区域电网安全运行
湖州境内特高压及跨区电网线路12回、长度924.3公里,占浙江全省总规模的42.05%。该机器人已纳入“立体巡检+集中监控”智慧运维体系,补齐了异物隐患快速处置环节,实现从发现到消缺的闭环管理,有力保障了能源输送大通道安全稳定运行。
5.媒体报道
特高压具身智能通用检修机器人的成功应用获得人民日报、科技日报、国资小新、浙江卫视、国家电网报、人民网等多家媒体报道。
技术路线
本项目围绕“感知-决策-执行-交互”四大环节,构建面向特高压带电作业的具身智能机器人系统。
1.需求分析与系统架构设计
针对特高压多分裂导线异物清除、金具检修等典型作业场景,梳理作业流程与技术约束(强电磁干扰、高空风载、轻量化要求等),确立“双仿人臂协作机器人+数字孪生地面站”的系统总体架构。
2.轻量化双臂机械系统研制
采用6自由度仿人构型进行机械臂结构设计与优化,通过拓扑优化与材料选型实现单臂自重低于7.5公斤、负载超5公斤、工作半径900毫米的性能指标。同步开发模块化末端执行器快换接口,适配柔性夹爪、电动螺丝刀、剪切工具等多种作业终端,满足不同任务需求。
3.力觉感知与柔顺控制技术开发
在机械臂末端集成六维力传感器,建立力位混合控制算法,实现接触式作业中的自适应柔顺控制,避免对线路设备造成刚性冲击。同步开发遥操作设备力反馈通道,将末端接触力实时映射至操作手柄,使远程操作员获得力觉感知能力。
4.超视距遥操作与通信系统搭建
构建5G与LoRa双链路冗余通信架构,核心控制走低延时通道,视频传输走大带宽通道,骨干网采用光纤替代铜缆,确保端到端延时低于10毫秒。基于ROS控制框架集成MoveIt运动规划引擎,支持自主路径规划、碰撞检测与实时笛卡尔伺服控制。
5.数字孪生地面站系统开发
搭建融合真实场景、虚拟镜像与控制设备的数字孪生地面站,集成屏幕升降、多路视频显示、沉浸式操作界面等功能模块,为操作员提供直观的三维态势感知与操控环境。
6.系统集成与实战验证
完成机械、电控、感知、通信各子系统联调,在实验室环境完成功能验证后,赴湖州特高压线路现场开展带电条件下的实战测试,验证系统在真实强电磁、高空风载环境中的可靠性与作业能力,持续迭代优化形成标准化作业流程。
应用场景
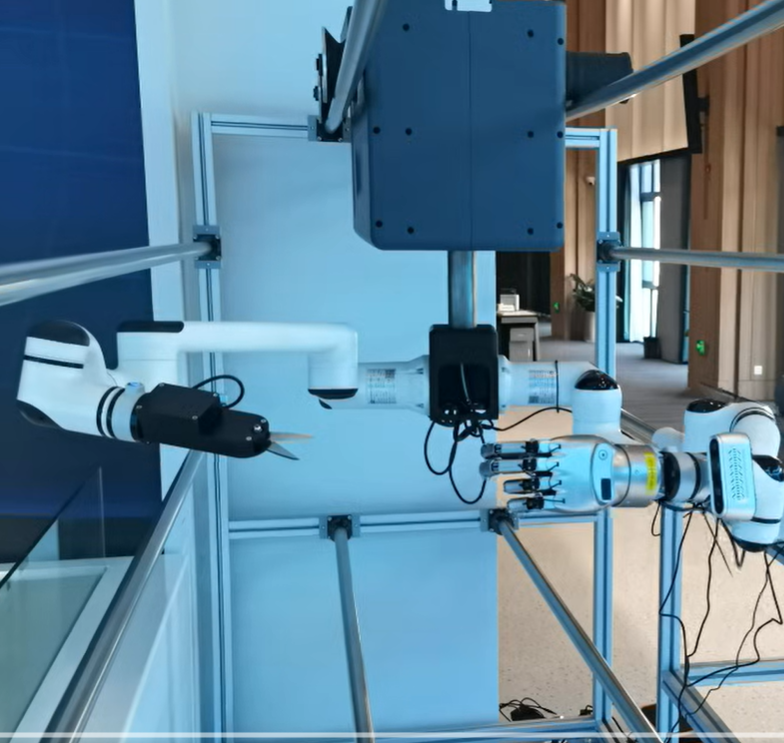
1.特高压输电线路异物清除
特高压通道外部运行环境日益复杂,风筝、塑料薄膜、低空无人机等异物悬挂隐患频发,严重威胁线路安全运行。传统处置方式需人工登塔或停电作业,风险高、响应慢。本项目机器人可在带电状态下远程操控,通过双臂协作配合柔性夹爪、剪切工具等末端执行器,对缠绕在多分裂导线上的各类异物实现精准快速清除,彻底消除人员高空触电和坠落风险。



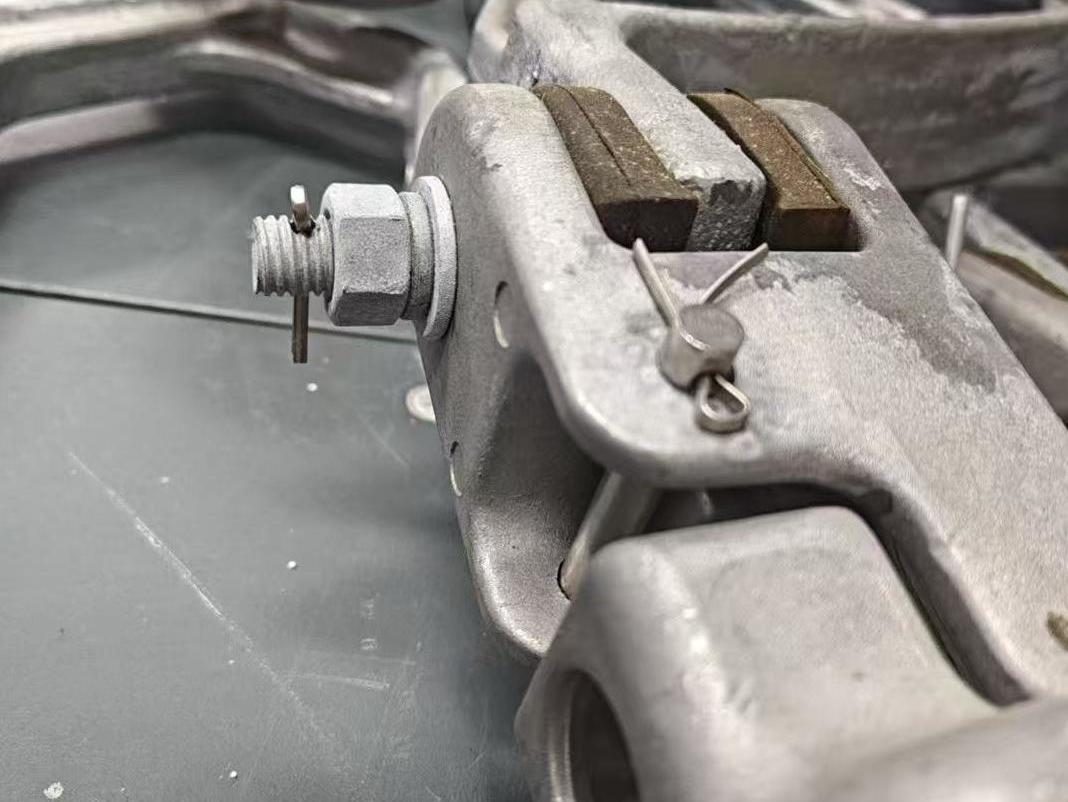
2.带电检修与金具维护
输电线路长期运行中,螺栓松动、销子脱落、附件老化等问题需定期检修处置。传统方式依赖带电作业人员高空手工操作,劳动强度大、作业窗口受限。本项目机器人通过模块化末端快换,可执行螺母紧固、开口销补装、附件安装等多类型检修任务,末端力觉感知系统确保接触式操作精准柔顺,避免对线路设备造成二次损伤,实现“一机多能”的通用化带电检修。

典型经验和推广前景
1.典型经验
案例完成后,于2025年11月-2026年1月期间,在湖州公司所辖的1000千伏安塘线、1000kV安兰线、1000kV湖安线、±800kV锦苏线等多条多分裂输电线路开展异物清除、销子补装、附件安装工作,同时也先后在省内嘉兴、金华,省外太原、合肥等单位开展应用,现场实测检测效果显著,得到以下经验:
1)需求牵引,实战导向
项目立足湖州特高压运维一线的真实痛点,从异物清障这一高频刚需场景切入,不追求技术指标的堆砌,而是紧扣“安全、高效、实用”三个核心诉求进行系统设计。从方案论证到实战上线,全程由运检人员深度参与需求定义与测试反馈,确保技术研发与现场需求紧密咬合。
2)关键技术突破
解决工程化难题项目攻克了多项面向特高压场景的工程化关键技术:在机械系统方面,实现单臂自重低于7.5公斤、负载超5公斤的轻量化设计;在感知控制方面,基于EtherCAT六维力传感器建立力位混合控制体系,解决远程接触式作业的柔顺操控难题;在通信方面,采用5G与LoRa双链路冗余加光纤骨干网架构,从物理层规避特高压电磁干扰,端到端延时低于10毫秒;在人机交互方面,构建数字孪生地面站实现作业现场与虚拟模型的实时映射,配合力反馈遥操作设备,使操作员在300米外获得沉浸式操控体验。
3)通用化设计,降低推广门槛
系统在架构设计之初即考虑多场景适配需求,采用标准化控制框架与模块化末端快换机制,不同作业任务只需更换末端工具并加载对应任务配置,无需重新开发,大幅降低了新场景的部署成本和培训周期。这一思路为后续规模化推广奠定了技术基础。
该项目研究成果具有较强的实际应用价值,建议推广。


2.推广前景
1)国网系统内推广
湖州经验可直接复制至浙江省内其他特高压密集区域,进而向国网系统全面推广。浙江全省每年承担2300余公里特高压及跨区直流线路运维任务,异物清除和带电检修需求量大面广。该机器人经实战验证、具备标准化作业流程,具备在省级乃至网级层面批量部署的条件。
2)跨电压等级延伸
当前系统针对特高压场景设计,通过调整绝缘防护方案和机械适配结构,可向500kV、220kV等不同电压等级输电线路延伸,覆盖更广泛的带电作业需求。
3)跨行业拓展
基于通用化平台架构,该系统可向桥梁检测、风电运维、核电检修等高空高危领域拓展。这些场景同样面临“环境危险、人工作业风险高、精细操作要求严”的共性难题,与本项目的技术能力高度匹配,市场空间广阔。
参与单位:国网湖州供电公司
参与人员:王云锋、来骏、岳灵平、季世超、程子健、刘平平、方杰、马波、陆璐、李石
上一篇:无











